





Por Rodrigo Díaz López
Con toda seguridad, los primeros robots en llegar a ser populares entre la mayoría de la población serán los coches autónomos. Porque un coche autónomo no deja de ser un ordenador con ruedas (y con muchos sensores) que es capaz de desplazarse sin intervención humana, lo que entra dentro de la definición de robot.
En lo que llevamos de siglo XXI hemos empezado a ver circular por nuestras carreteras vehículos que, en mayor o menor medida, empiezan a ser autónomos: se aparcan solos, circulan en autopista conservando la distancia de seguridad o, incluso, frenan para evitar un atropello. No obstante, todavía falta tiempo (aunque poco) para que se comercialice un vehículo totalmente autónomo, que pueda circular sin conductor en cualquier carretera y en cualquier condición meteorológica, tal como hacía aquel célebre Pontiac Firebird Trans AM que en España conocíamos como “El coche fantástico”.

Tecnología necesaria para la conducción autónoma
Los sistemas de conducción autónoma necesitan de varios sistemas de sensores, que funcionan con distintas tecnologías, entre los que podemos destacar los siguientes:
-
Sensores ultrasónicos. Son efectivos para detectar elementos que se encuentran a poca distancia del vehículo. Funcionan emitiendo ondas sonoras no audibles y calculando el tiempo que tardan en regresar al punto de emisión. Son frecuentes desde hace varios años en los automóviles, por su bajo coste, y suelen emplearse en los sistemas de ayuda al aparcamiento.
-
Posicionamiento y navegación por satélite. Su uso también está extendido desde hace varios años. Estos sistemas pueden localizar un vehículo en cualquier punto del planeta mediante la técnica de trilateración, utilizando una red de satélites. Su principal inconveniente es que tiene un margen de error de unos (pocos) metros, por lo que requiere de otras técnicas para conseguir una localización más precisa, necesaria para los niveles altos de autonomía.
-
Sistemas de navegación inercial. Intervienen sensores de movimiento y sensores giroscópicos que calculan en todo momento, mediante estima y sin referencias externas, la posición de un vehículo, su dirección y su velocidad. Suelen utilizarse en conjunto con los sistemas de posicionamiento para aumentar su precisión, aunque todavía no garantizan una precisión suficiente para una conducción autónoma plena.
-
Sistema de cámaras. Están generalizados en automoción. La tecnología está muy desarrollada desde el punto de vista de la calidad y el bajo precio de las cámaras. No obstante, su efectividad se reduce en condiciones de poca luz o de climatología adversa.
-
Sensores infrarrojos. La luz infrarroja del espectro es invisible al ojo humano y se emplea para detectar y realizar un seguimiento de objetos en condiciones de poca luz. Desde principios de la década de 2010 comienzan a ser relativamente frecuentes como elementos de equipamiento opcional en vehículos de gama alta. El primer vehículo que se ofreció con un sistema de visión nocturna fue el Cadillac DeVille del año 2000.
-
Radar. Utiliza ondas electromagnéticas para detectar y realizar un seguimiento de objetos. Puede funcionar con mucha precisión en distancias de hasta unos 300 metros y es muy efectivo principalmente para determinar la presencia de otros vehículos, y también para determinar la dirección en la que viaja y a qué velocidad lo hace. Su efectividad apenas decrece en condiciones de baja visibilidad o climatología adversa y, además, su coste es relativamente bajo. Su uso ya está generalizado en la industria del automóvil en asistentes a la conducción como el control de crucero adaptativo, la detección de vehículos en el ángulo muerto, el frenado automático de emergencia o los sistemas de protección previa a la colisión.
-
Lídar. Es un acrónimo del inglés LIDAR (Laser imaging detection and ranging). Este sistema permite determinar la distancia desde un emisor láser a un objeto utilizando haces láser pulsados. Los sistemas lídar modernos permiten recoger información complementaria al radar. La distancia de alcance de los haces láser es mucho mayor que la de los ultrasonidos y el grado de definición que se consigue sobre la información del entorno es mucho más alto, pero tienen como inconveniente que funcionan mal en condiciones de lluvia o niebla.
Los vehículos autónomos necesitan recopilar la información de todos estos sistemas de sensores y combinarla para poder tener un conocimiento completo del entorno. Lógicamente, esta recogida de datos tiene que estar en constante actualización, adaptándose a los movimientos del propio vehículo. Es habitual que se elabore un mapa tridimensional que permita localizar la posición del vehículo respecto al entorno. Por otro lado, esta información se compara con mapas recopilados previamente, lo que permite ubicar un vehículo con una precisión absoluta... aunque solamente en aquellas zonas previamente cartografiadas.
Pero el mayor desafío de los sistemas de conducción autónoma radica en el desarrollo del software que realice una interpretación correcta de las imágenes y una posterior elaboración de las decisiones correctas. Para ello, se suele utilizar un algoritmo de machine learning al que se entrena con distintas imágenes que muestren todas las situaciones de tráfico posibles. Cada una de las imágenes se asocia con el tipo de vehículo que contiene. El algoritmo empieza a procesar las imágenes. Inicialmente, intenta adivinar que vehículo hay en cada imagen y al principio se equivocará muy a menudo. Como conoce que vehículo hay en realidad en cada imagen, modificará y adaptará parámetros internos y lo volverá a intentar. El proceso continuará, reduciendo sucesivamente la tasa de fallos. Más adelante, cuando se le presenten nuevas imágenes podrá clasificarlas correctamente. Ese mismo enfoque se puede utilizar para la toma de decisiones. En vez de proporcionar una lista de normas con las que evaluar la acción a tomar para cada situación, se entrena un algoritmo con situaciones de tráfico en las que se especifica la acción correcta a tomar. Igual que antes, el algoritmo intentará adivinar la acción correcta y modificará parámetros internos en función de si se equivoca o acierta.
En resumen, que las limitaciones tecnológicas de los vehículos autónomos actuales no residen en el hardware, sino en el software.
Los niveles de la conducción autónoma
Como se comentaba al inicio del artículo, las empresas automovilísticas ya incorporan automatismos en algunos de sus vehículos, que descargan al conductor de realizar ciertas tareas. Para poder comparar entre las distintas prestaciones de diferentes vehículos, la Sociedad de Ingenieros Automotrices (SAE) ha establecido una clasificación para determinar cuál es el nivel de autonomía de un vehículo determinado. Este baremo cuenta con 6 niveles:
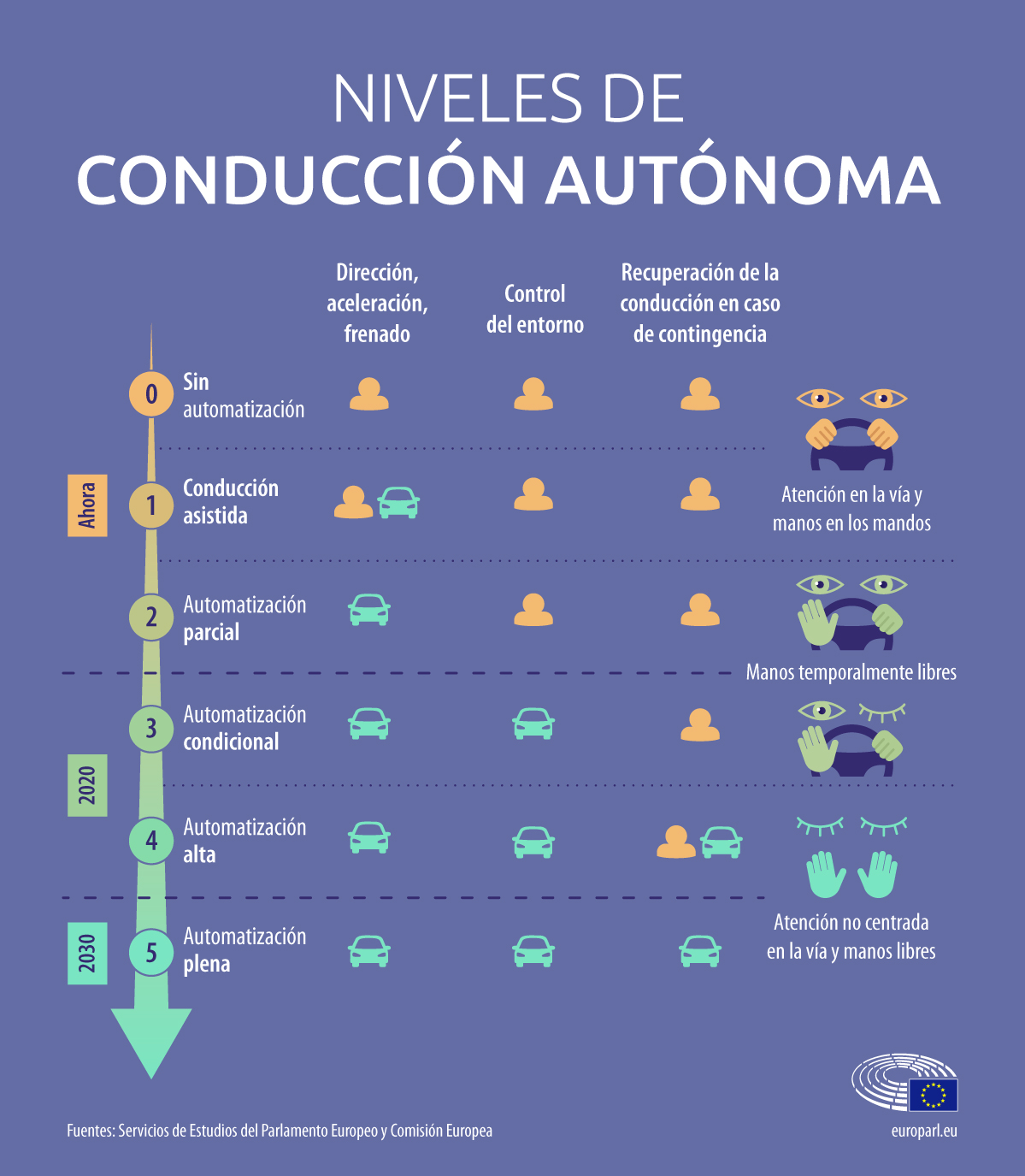
Nivel 0: Sin automatización
Es el nivel inicial. El conductor está al mando y se hace cargo de todas las acciones necesarias para conducir el vehículo. Los sistemas de seguridad activa como el ESP o el ABS, aunque suponen una ayuda a la conducción, no se consideran automatización.
Nivel 1: Autonomía básica
Los vehículos de nivel 1 son aquellos que pueden controlar el movimiento lateral o longitudinal, pero no los dos a la vez, por ejemplo por medio de un sistema de frenada de emergencia (AEB), un control de velocidad de crucero adaptativo (ACC), o un sistema de aviso de cambio involuntario de carril.
Gran cantidad de los coches a la venta actualmente están en este nivel. En 1999, el Mercedes-Benz Clase S se convirtió en el primero, al contar con un control de velocidad adaptativo asistido por radar (Distronic), que le permitía mantener la distancia en autopista incluso en condiciones de niebla o lluvia intensa.
Nivel 2: Automatización parcial
En este nivel, los vehículos tienen asistentes a la conducción que permiten controlar el movimiento lateral y también el longitudinal. Aquí empezamos a tener cierta autonomía, que permitiría al conductor separar las manos del volante y la vista de la carretera, aunque solo durante breves periodos de tiempo. Por ejemplo, si se combina un control de crucero adaptativo con un asistente de mantenimiento de carril (LKA), un vehículo podrá circular por una autopista de forma autónoma. Los sistemas de aparcamiento automático, en los que el vehículo toma el control del volante y los pedales, también permiten que un vehículo sea considerado como perteneciente al nivel 2 de autonomía.
El primer coche en alcanzar el nivel 2 fue el Mercedes-Benz Clase S en 2013.
Nivel 3: Automatización condicional
En los coches de este nivel, el conductor puede decidir que el sistema de conducción automatizada tome el control del vehículo y realice todas las funciones de la conducción, aunque con unas ciertas limitaciones.
Para ello, los vehículos deben ser capaces de analizar el entorno y tomar decisiones. Esta tecnología utiliza sensores y cámaras para registrar todo lo que sucede alrededor del vehículo para que, en el momento en que el conductor cede voluntariamente el control, el coche pueda tomar las decisiones oportunas. De este modo, pueden circular por una autopista e, incluso, tomar una salida y continuar circulando por carretera, o detenerse y avanzar en medio de un atasco sin que el conductor realice maniobra alguna. Eso sí, el conductor debe estar siempre pendiente de lo que sucede en la carretera para volver a tomar el control en caso necesario, bien porque el sistema no sepa cómo actuar ante una situación imprevista de peligro, por ejemplo ante unas obras en la carretera, o bien porque se sobrepasen sus límites geográficos de actuación. En esos casos, el sistema da un margen de tiempo, de varios segundos, para el que conductor vuelva a retomar el control del vehículo.
Actualmente, el máximo representante del nivel 3 de autonomía es el Autopilot 2.0 del Tesla Model S.

Nivel 4: Automatización alta
En este nivel, el sistema de conducción automatizada puede conducir el vehículo de forma sostenida en el tiempo sin la expectativa de que el conductor responda ante una demanda de intervención, salvo cuando se encuentre fuera de su ámbito de actuación. El sistema está preparado para actuar ante una situación imprevista de peligro y para realizar sin ayuda el conjunto de acciones que desenlacen en la situación más segura posible (se le denomina situación de mínimo riesgo). Aunque el sistema de conducción automatizada de los vehículos de nivel 4 también tiene un ámbito de actuación, y puede avisar al conductor para que retome la conducción, en el caso de que el conductor no responda el vehículo será capaz de detenerse en una zona segura (no se espera que el conductor retome el control). Es decir, el conductor tan solo tendría que indicar el lugar al quiere desplazarse y dejarse llevar, aunque tendría la posibilidad de tomar el control del coche porque éste seguiría teniendo los mandos (volante, pedales) para poder ser conducido por un conductor humano.
Un ejemplo de vehículos de este nivel serían los coches autónomos de Google, que ya circulan en pruebas en entornos controlados.
Nivel 5: Automatización plena
En el nivel 5, el sistema de conducción automatizada (ADS, automated driving system) tiene un ámbito de funcionamiento que comprende todas las condiciones y lugares por los que podría circular un conductor humano. Esto quiere decir que para el ADS no se diseñan limitaciones geográficas o climatológicas y, por tanto, que el vehículo puede prescindir de un conductor... y de elementos como el volante o los pedales.
Aunque puede parecer un pequeño paso con respecto al nivel anterior, la autonomía total es un desafío para la tecnología actual, porque implica sustituir al conductor en cualquier situación o condición, lo que incluiría conducir sobre caminos no asfaltados, en situaciones meteorológicas adversas… o incluso aparcar entre columnas en un oscuro aparcamiento subterráneo. Además, hay que tener en cuenta que no todo dependerá del vehículo en sí, sino también de la posibilidad de comunicación con otros vehículos, con las infraestructuras o con los centros de control de tráfico. Este nivel de automatización requiere de cambios legislativos, además de una serie de intervenciones en infraestructuras. El Parlamento Europeo prevé que no será una realidad antes de 2030.
Algunas empresas están trabajando actualmente en prototipos de vehículos autónomos de nivel 5, con el objetivo de poder operar taxis o camiones autónomos. También se está trabajando en avances tales como autopistas en las que los vehículos autónomos eléctricos se recargarían por inducción mientras circulasen por ellas.
Legislación y ética robótica
La conducción autónoma plantea numerosas ventajas con respecto a la tradicional. La primera ellas tiene que ver con la seguridad vial, porque un vehículo autónomo jamás excederá un límite de velocidad o realizará una maniobra ilegal. Su funcionamiento se basa en el cumplimiento estricto de unas directrices impuestas. No hay interpretación, ni mucho menos violación de las normas. Salvo fallo. Además, gracias a tecnologías como el láser, el radar, el GPS o la visión de cámaras, el vehículo tendría una visión de 360 grados del entorno, algo que no es capaz de conseguir un conductor humano. Todo esto supondría el mayor avance en seguridad vial que se haya producido, puesto que los vehículos autónomos alcanzarían una prudencia y un control imposibles de alcanzar por un ser humano.
No obstante, de no realizarse pronto un cambio legislativo puede ocurrir que vehículos muy avanzados tecnológicamente se vean limitados por una legislación que apenas les deje margen de funcionamiento. Puede producirse una situación análoga a la que se planteó a finales del siglo XIX, tanto en el Reino Unido como en los EE.UU., cuando una serie de leyes obligaron a los automovilistas a llevar una persona caminando delante de su vehículo portando en todo momento una bandera roja, con el fin de avisar a los usuarios de las vías del potencial peligro. Lógicamente, esta reglamentación impedía precisamente unas de las ventajas más evidentes de la nueva tecnología, que era la posibilidad de circular más rápidamente que a paso humano. Porque, con la reglamentación actual, no es posible la conducción autónoma plena, dado que es obligatorio que dentro del vehículo viaje un conductor responsable de los accidentes que se puedan producir. Por otro lado, la legislación actual obliga a los futuros vehículos totalmente autónomos a contar con una serie de dispositivos, que van desde el volante y los pedales hasta los espejos retrovisores o los indicadores de dirección, de los que perfectamente podrían prescindir.
Así que el principal obstáculo para la implementación de los vehículos autónomos no deriva solo de las limitaciones de las tecnologías de conducción, sino también de factores políticos, jurídicos, de regulación, de infraestructura y de responsabilidad que deben abordarse.
Un asunto importante es el de la responsabilidad. No solo ante golpes de chapa, sino ante accidentes mortales. Porque, aunque hasta ahora solo han estado circulando unos pocos prototipos, ya se han producido muertes relacionadas con coches autónomos. El primer accidente mortal involucró, el 7 de mayo de 2016, a un Tesla Model S que pasó por debajo de un camión en una autopista de Florida. El camión cambió repentinamente de carril delante del Tesla y ni el vehículo autónomo, ni el conductor "responsable", lo vieron venir porque el lateral del camión era metálico y reflejaba el brillante cielo azul. El vehículo autónomo, después de seccionar la cabeza de su "conductor", siguió circulando unos 300 m. hasta terminar empotrado contra un poste. En este caso, la responsabilidad del accidente fue compartida por el conductor del camión, que no cedió el paso al automóvil, y el conductor del automóvil, que no prestó la suficiente atención quizá debido a una excesiva confianza en la automatización del vehículo. Pero si en el futuro se autorizase e implantase la conducción totalmente autónoma, la responsabilidad en un accidente debería recaer directamente sobre el fabricante del vehículo responsable del mismo.
Otro asunto importante son las cuestiones morales. Está claro que los coches autónomos reducirán los accidentes producidos por imprudencias o errores humanos, pero siempre habrá situaciones en las que, por un fallo mecánico o por las condiciones de la carretera, se produzcan accidentes inevitables. Y, en estos casos, las máquinas deberán decidir sobre el menor de dos males y, para ello, tendremos que dotarles de principios morales. No bastaría simplemente con rescatar las “Tres leyes de la robótica”, del genial Isaac Asimov, porque en el mundo real pueden producirse situaciones muy complejas. Supongamos que un vehículo autónomo se queda sin frenos llegando a un paso de cebra y que tiene que elegir entre seguir recto y atropellar a una mujer embarazada, o dar un volantazo y estrellarse contra un muro matando a los dos hombres que lleva como ocupantes. Un experimento social ha planteado este tipo de preguntas a miles de personas en todo el mundo, tratando de establecer lo que los humanos consideramos más o menos correcto. Todavía se puede participar y comprobar los resultados obtenidos en diferentes países. Hay conclusiones cuanto menos curiosas. Por ejemplo, en Bolivia se valora más la vida de los animales que la de las personas, en Arabia Saudí salvar la vida de un hombre mayor obeso es preferible a salvar la vida de 98 mujeres jóvenes en forma, y en Japón prefieren estampar un autobús autónomo lleno de personas contra un muro antes que atropellar a un único peatón. Así que la elaboración de una guía moral para vehículos autónomos puede resultar muy compleja y podrían incluso llegar a tener variaciones regionales. En Alemania, cuya industria automovilística es reconocida por ser la más competitiva e innovadora del mundo, ya se han puesto a ello. El Ministerio de Transporte alemán ha elaborado un informe con los estándares éticos que deberían regir la conducción autónoma y que establecen que la protección de la vida humana debe ser la máxima prioridad (Asimov estaría encantado) y que, en el caso de una situación de accidente inevitable, cualquier discriminación basada en la edad, sexo, raza, atributos físicos o cualquier otro factor distintivo es inadmisible.
Otro asunto que no se puede obviar es el tema de la ciberseguridad, porque en el futuro lo coches ya no se robarán, se hackearán. Y este hackeo podría ir desde la simple apropiación indebida de un vehículo, hasta su manipulación para provocar un accidente mortal (bien de los ocupantes o bien de un grupo de peatones), pasando por configurarlo en "modo vehículo de emergencias” para permitirle circular sin respetar los límites de velocidad y sin necesidad de detenerse en los semáforos en rojo. Aquí las autoridades y los fabricantes también tendrán que ponerse a trabajar, para tomar medidas que garanticen la protección de los vehículos autónomos contra posibles ataques cibernéticos.
Por último, los vehículos autónomos no solo traerán ventajas. Aunque la conducción autónoma creará nuevos empleos en la industria de la automoción y en la del desarrollo de software, destruirá numerosos empleos en el sector del transporte, condenando a los chóferes, taxistas, conductores de autobuses o camioneros a compartir destino con los arrieros, los serenos, los herreros o los pregoneros. Y también tendrá otro efecto lateral no deseado. Como los camiones ya no estarán limitados por los periodos de descanso de los conductores, y podrán estarán circulando constantemente por autopistas electrificadas sin tener que detenerse, ya no tendremos forma de saber en qué restaurante de carretera se come bien… porque en ninguno de ellos habrá camiones aparcados.